Model vzduchovej loptičky
Fyzikálny model vzduchovej loptičky
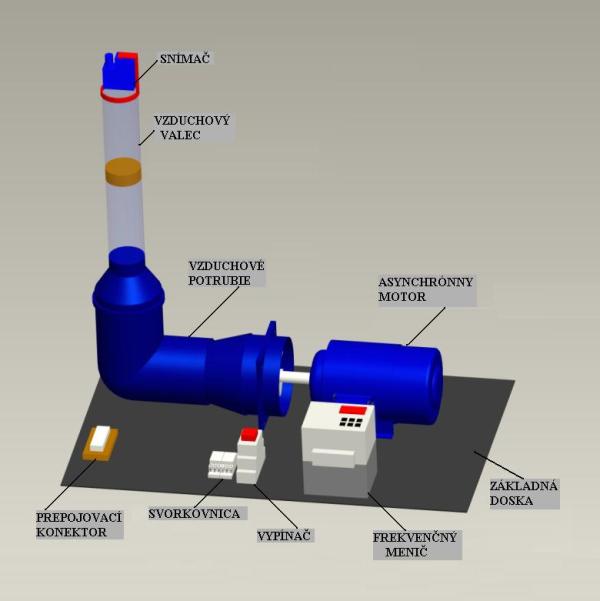
Fyzikálny model vzduchovej loptičky pozostáva z týchto základných častí:
- frekvenčný menič
- asynchrónny motor
- snímač
- vzduchové potrubie
- svorkovnica
- prepojovací konektor medzi fyzikálny model a PLC
- vypínač
- vzduchový valec z plexiskla
- základná doska
Výstupom z fyzikálneho modelu je informácia zo snímača o polohe telesa vo vzduchovom valci, je to analógový signál o veľkosti 4-20mA.Tento signál je privedený zo snímača cez svorkovnicu na prepojovací konektor.
Vstupom do fyzikálneho modelu je riadiace napätie pre frekvenčný menič ktoré sa privádza cez prepojovací konektor priamo k meniču. Veľkosť tohto riadiaceho napätia je 0-10 V.
Fyzikálny model vzduchovej loptičky:

Virtuálny model vzduchovej loptičky:
Pre reguláciu výšky vzduchového stĺpca sa využíva blok PID regulátora programovateľného automatu Simatic S300. Bloková schéma zapojenia PID regulátora je na obrázku:
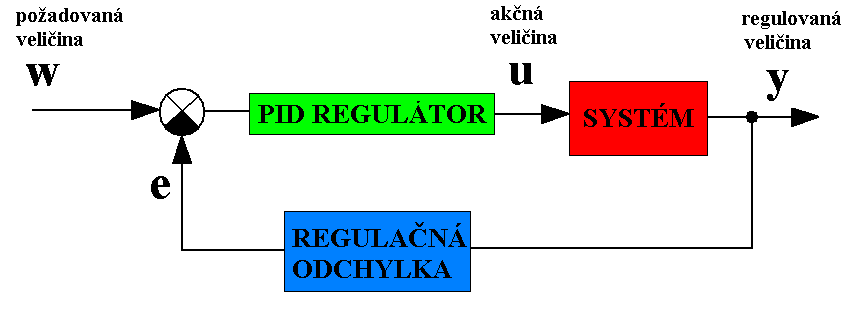
Regulovaná veličina je výstup zo snímača, ktorý je privedený na vstup PIW272 bloku MOVE, kde sa prevádza na veličinu typu Word. Želaná hodnota – w, je výška vzduchového stĺpca v rozsahu 100 – 400 mm.
Úloha:
Vytvorte riadaici program, ktorý zabezpečí reguláciu výšky loptičky vo vzduchovom stĺpci v rozsahu 100 až 400 mm. Pri riešení úlohy využite štandardný blok PID regulátora PLC Simatic S300.