Fyzikálny model robotického pracoviska OTROBO
Fyzikálny model robotického pracoviska OTROBO pozostáva 5-kĺbového aktuátora ovládaného prostredníctvom grafického prostredia vytvoreného v programe Matlab, čo umožňuje komplexnejšie riešenie úloh z oblasti robotiky (výpočty priamej kinematickej úlohy, inverznej kinematickej úlohy, vlastné simulácie pohybu robotického ramena).
Robotické pracovisko pozostáva z nasledujúcich častí:
Robotické rameno – s piatimi stupňami voľnosti, s pracovnou obálkou menšou ako jeden meter štvorcový.
Riadiaci systém – predstavuje počítač s obrazovkou, ktorý zabezpečuje komunikáciu, vizualizáciu a ovládanie robotického ramena riadiacimi signálmi.
Grafické ovládacie užívateľské prostredie – realizované v jednom programe, je prehľadné, zobrazuje všetky potrebné prvky ovládania a riadenia robotického pracoviska. Pomocou externých zariadení sníma vybrané veličiny, spracúva zosnímané údaje a riadi robotické rameno. Je vytvorené v prostredí MATLAB.
Obr. 1 Robotické pracovisko
Robotické rameno a jeho parametre
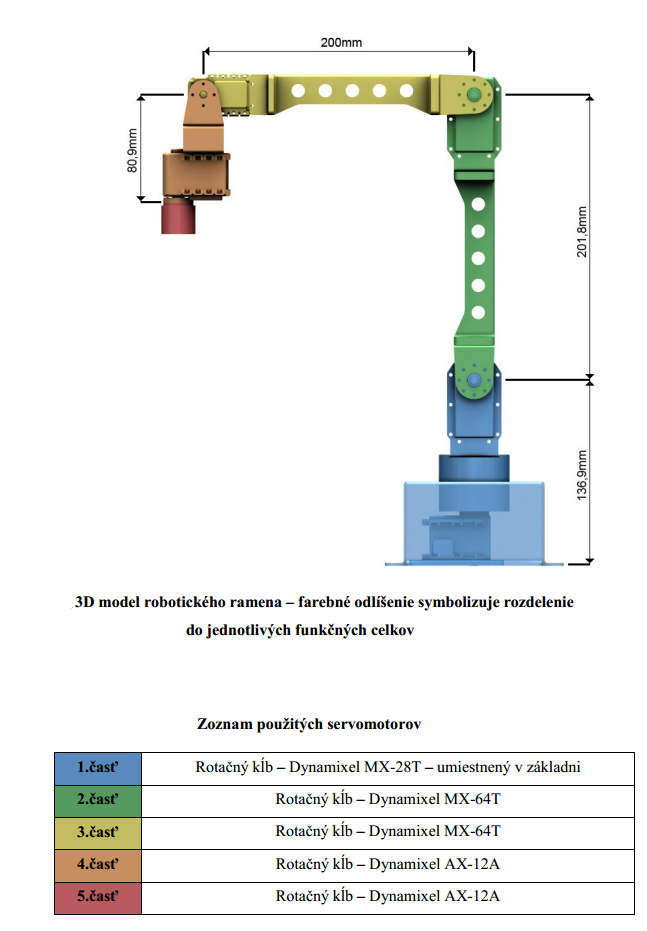
Pre zostavenie robotického ramena boli použíté servopohony Dynamixel od firmy Robotis.
Pri realizácii robotického ramena boli použité tri typy servopohonov:
- Pre 5. a 4. kĺb – Robotis Dynamixel AX-12A (Obr. 3)
- Pre 3. a 2. kĺb – Robotis Dynamixel MX-64T (Obr. 4)
- Pre 1. kĺb – Robotis Dynamixel MX-28T
Všetky dôležité parametre vybraných servomotorov a merateľné rozdiely sú uvedené v nasledujúcej tabuľke:
Tab.1: Parametre nami zvolených servomotorov Dynamixel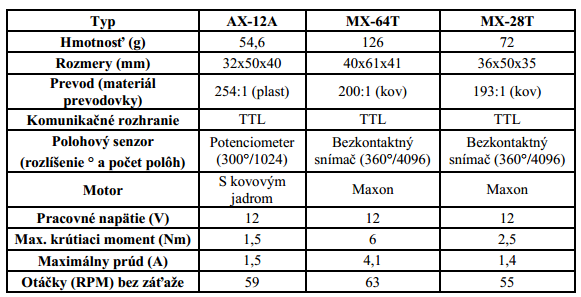
Grafické užívateľské prostredie
Základným ovládacím prvkom robotického ramena je grafické užívateľské prostredie - GUI (Obr. 2.), vytvorené v programe MATLAB, ktoré zabezpečuje komunikáciu a základné riadenie robotického ramena, prepočet oboch kinematických úloh, tvorbu trajektórií pohybu, animáciu pohybu, snímanie veličín a generovanie, snímanie a vyhodnocovanie obrazu pracoviska.
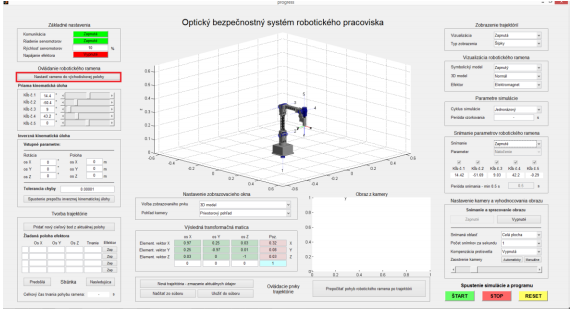
Obr.2 Virtuálny model robotického pracoviska OTROBO
Virtuálny model OTROBO bol vytvorený v programe Matlab s využitím voľne stiahnuteľného zásuvného modulu pre MATLB-Robotics Toolbox.
Funkcie virtuálneho modelu robotického pracoviska OTROBO sú rozdelené do jednotlivých celkov podľa ich umiestnenia v rámci používateľského rozhrania (z ľavej hornej časti obrazovky až po jej pravú dolnú časť):
- východisková poloha
- komunikácia
- výpočet kinematických úloh
- Priama kinematická úloha
- Inverzná kinematická úloha
- transformačná matica
- tvorba trajektórií pohybu
- vizualizácia 3D modelu robotického ramena
- snímanie parametrov pohonov robotického ramena
- zobrazovanie vybraných veličín
- spustenie programu a parametre simulácie
Detaily popisu grafického používateľského rozhrania sú uvedené v e-learningovom učebnom texte prístupnom na webovej stránke virtuálneho laboratória v časti E-learningové študijné materiály.
Úloha 1
Popíšte polohu a orientáciu koncového bodu – efektora robotického ramena s využitím priamej kinematickej úlohy.
Úloha 2
Na základe požadovanej pozície a orientácie robotického ramena vypočítajte požadované natočenia jednotlivých kĺbov robotického ramena (inverzná kinematická úloha).
Úloha 3
Na robotickom pracovisku máme umiestnený objekt, ktorý chceme premiestniť na presne definované miesto, pričom nepoznáme presnú polohu žiadaného objektu.
Vašou úlohou je zdvihnúť daný objekt zo zeme použitím elektromagnetu a premiestniť objekt na presne určenú pozíciu na druhej podložke.