Fyzikálny model AUTIVO
Fyzikálny model AUTIVO je komplexný mechatronický systém s riadiacim systémom na báze PLC a vizualizačným rozhraním. Je určený okrem možnosti testovania rôznych navigačných teórií aj pre riešenie rôznych úloh spojených s jeho návrhom, ako je dimenzovanie elektromotorov, akumulátora, návrh a realizácia regulačných štruktúr použitých pohonov až po vizualizáciu a správu dát na najvyššej úrovni (napr. tvorba mapy priestoru).
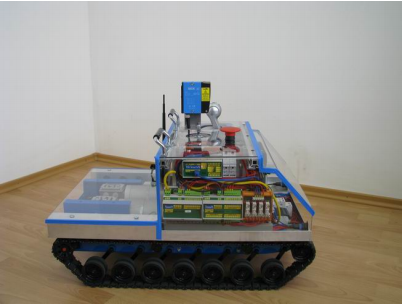
Obr.1 Fyzikálny model AUTIVO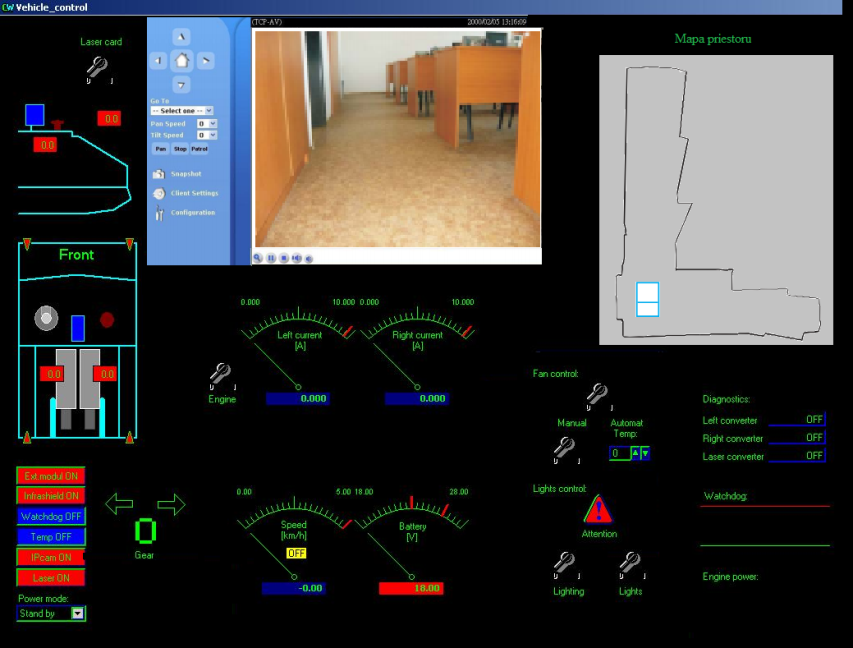
Obr.2 Virtuálny model AUTIVO
Riadiaca jednotka
Riadiaca jednotka bola navrhnutá na báze programovateľného logického automatu firmy B&R.
Popis vstupov
Digitálne vstupy
V tabuľke 1 je popísaných osem digitálnych vstupov s označením vstupu, pripojeným signálom a označením svorky prepoja signálu. Vstupy signálov z IRC snímačov pracujú v čítačovom režime. Vstup zo STOP tlačidla je naviazaný na prerušovací proces ITR7. Proces sa spúšťa prerušením 24V signálu na vstupe.
Tab. 1 Rozdelenie digitálnych vstupov podľa signálov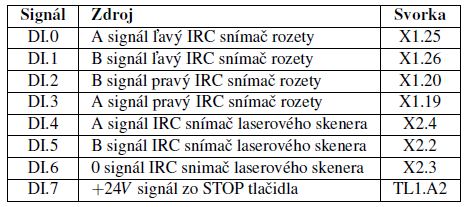
Analógové vstupy
Analógový vstup AI.0 bol prednastavený na rozsah 4 až 20mA. Vstupy AI.1 až AI.3 sú prednastavené na rozsah 0:::10V. Popis jednotlivých analógových signálov s priradeným zdrojom je v tabuľke 2.
Tab. 2 Rozdelenie analógových vstupov podľa signálov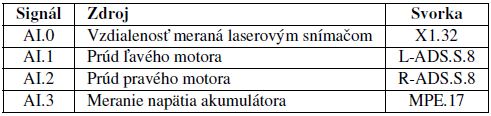
Popis výstupov
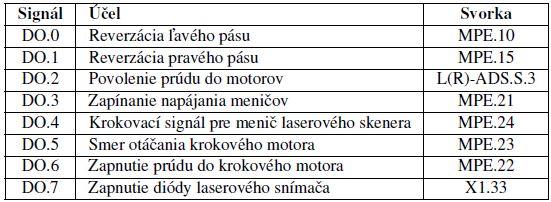
Digitálne výstupy PLC pracujú s 24 voltovým jednosmerným napätím. Použitie jednotlivých výstupov s prepojom na svorku ovládaného zariadenia je popísané v tabuľke 3.
Tab. 3 Rozdelenie digitálnych výstupov podľa signálov
IP kamera
V manuálnom režime je vozidlo navádzané viditeľným kontaktom užívateľa s vozidlom. Pre prípad, že vozidlo je v priestore mimo dosahu užívateľa, bola zvolená IP kamera s možnosťou natáčania. Natáčanie kamery je vo vertikálnom smere 125° a v horizontálnom smere 350°.
Laserový snímač
Laserový snímač pracuje na vlnovej dĺžke 650nm. Vysielaný lúč má výkon 22mW. Odraz lúča je zachytávaný v optike a z časovej diferencie je vypočítaná vzdialenosť. Výstup snímača pracuje v rozsahu 4:::20mA.
Virtuálny model - Ovládacie rozhranie
Okno vizualizácie bolo rozdelené na niekoľko oblastí podľa nasledujúceho obrázka: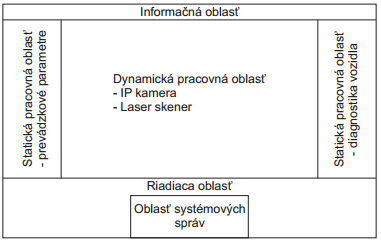
- Informačná oblasť obsahuje názov rozhrania.
- 2. Pracovná oblasť je rozdelená na tri zóny:
- V ľavej zóne sa nachádzajú informácie o prevádzkových parametroch vozidla. Prvky laserový snímač a tlačidlo total stop zobrazujú aktuálny stav. Pri zapnutých snímačoch teploty sa na motoroch zobrazuje ich teplota. Pri zapnutom infraštíte sa zobrazujú aktívne infra snímače, ktoré blokujú pohyb vozidla.
- V strednej zóne sa nachádza dynamická pracovná oblasť. V tejto oblasti sú zobrazené karty IP kamery a laserového skenera. Zobrazenie kariet nekoliduje, pretože obraz kamery sa používa v manuálnom režime a laserový skener v autonómnom režime. Karta IP kamery je zapínaná pomocou tlačidla v riadiacej oblasti, ktoré ju aj reálne zapína vo vozidle. Karta laserového skenera sa zapína cez tlačidlo v riadiacej oblasti.
- V pravej zóne je umiestnená diagnostika vozidla. Sú tu zobrazené všetky dostupné diagnostické údaje a v prípade chyby je odosielaná správa cez oblasť systémových správ. Je tu umiestnený stav premennej bezpečnostného nástroja Watchdog.
- Riadiaca oblasť obsahuje ovládacie a zobrazovacie prvky:
- Ovládanie napäťových okruhov vozidla tlačidlami.
- Voľba režimu správy napájania.
- Odblokovanie po stlačení tlačidla Total stop.
- Povoľovanie prúdu do motorov.
- Zobrazovanie prúdu ľavého a pravého motora, rýchlosti v [km/h] a napätia batérie.
- Zobrazovanie premennej Rýchlosť.
- Zobrazovanie smeru pohybu vľavo a vpravo.
- Oblasť systémových správ zobrazuje správy nadefinovaných alarmov z diagnostiky vozidla a z chybových hlásení prístrojov.
Detaily popisu používateľského rozhrania pre ovládanie fyzikálneho modelu sú uvedené v e-learningovom učebnom texte umiestnenom na webovej stránke virtuálneho laboratória.
Úloha 1
Oboznámte sa s ručnou navigáciou autonómneho vozidla pomocou vizualizačného rozhrania.
Úloha 2
Naštudujte si proces vytvárania mapy priestoru pomocou laserového snímača.
Úloha 3
Zistite aktuálnu polohu vozidla na báze informácií z laserového skenera
Úloha 4
Vytvorte si vlastný jednoduchý algoritmus vytvárania mapy priestoru na báze informácií z laserového snímača.